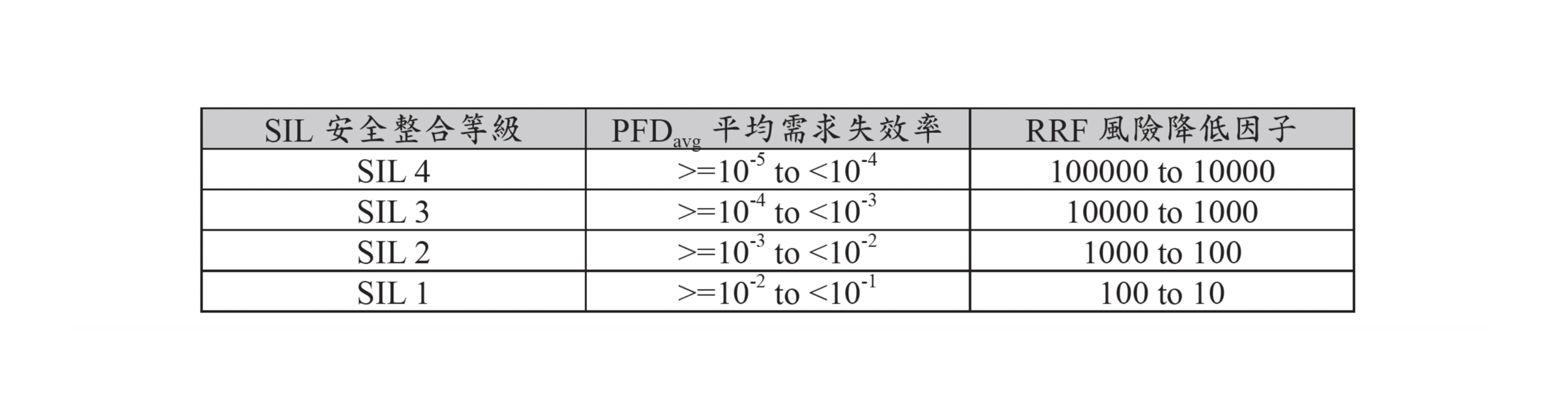
同上例子若此設備設已有其他獨立保護層,若此獨立保護層的需求失效率 (PFD, Probability of Failure on Demand) 為10-1,則經保護層減輕後之頻率為2*10-2次/年*10-1=2*10-3次/年,RRF=2*10-3/10-5=200,比對表一可發現採用SIL 2等級的安全迴路即可。
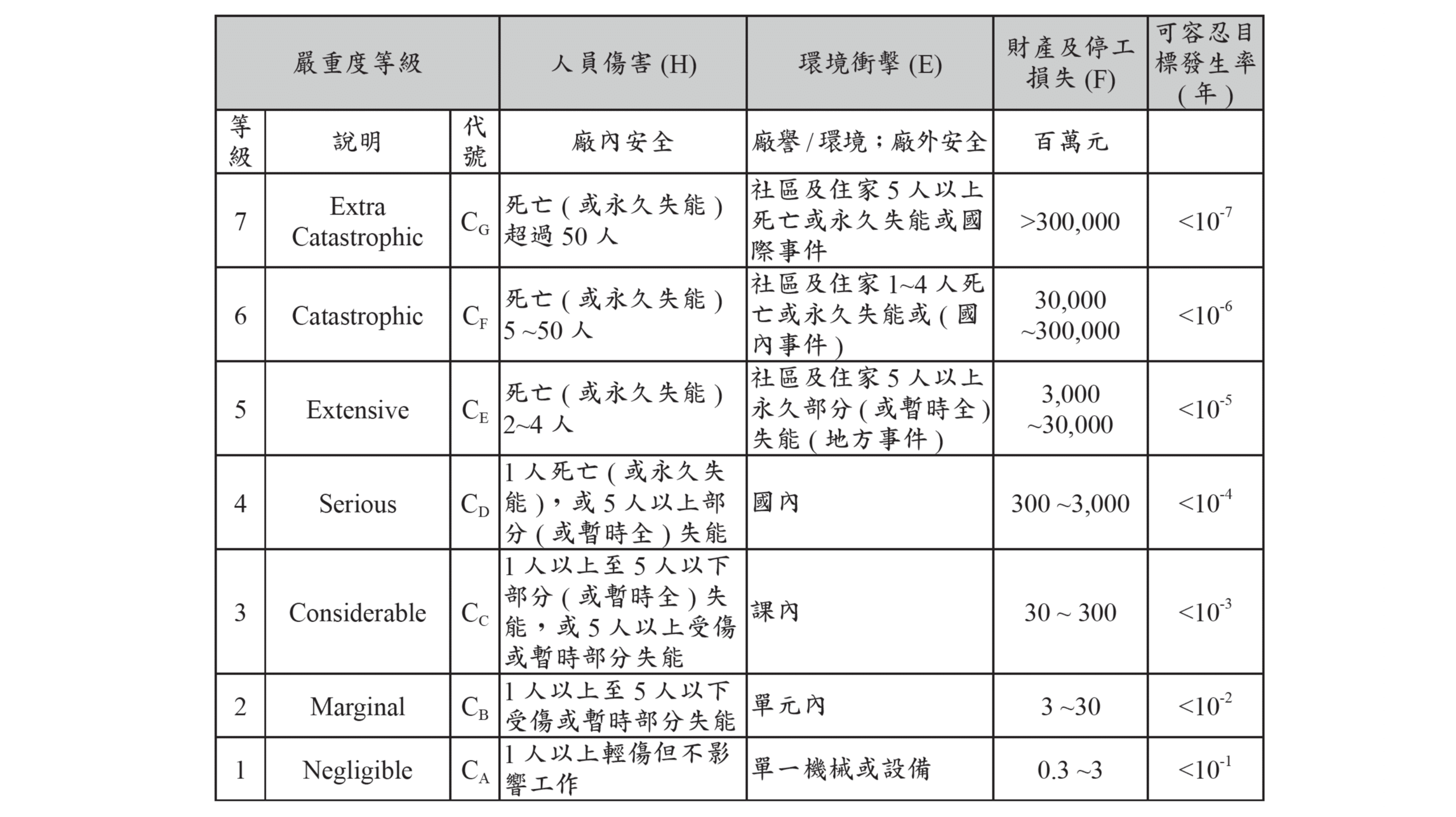
表二、風險目標
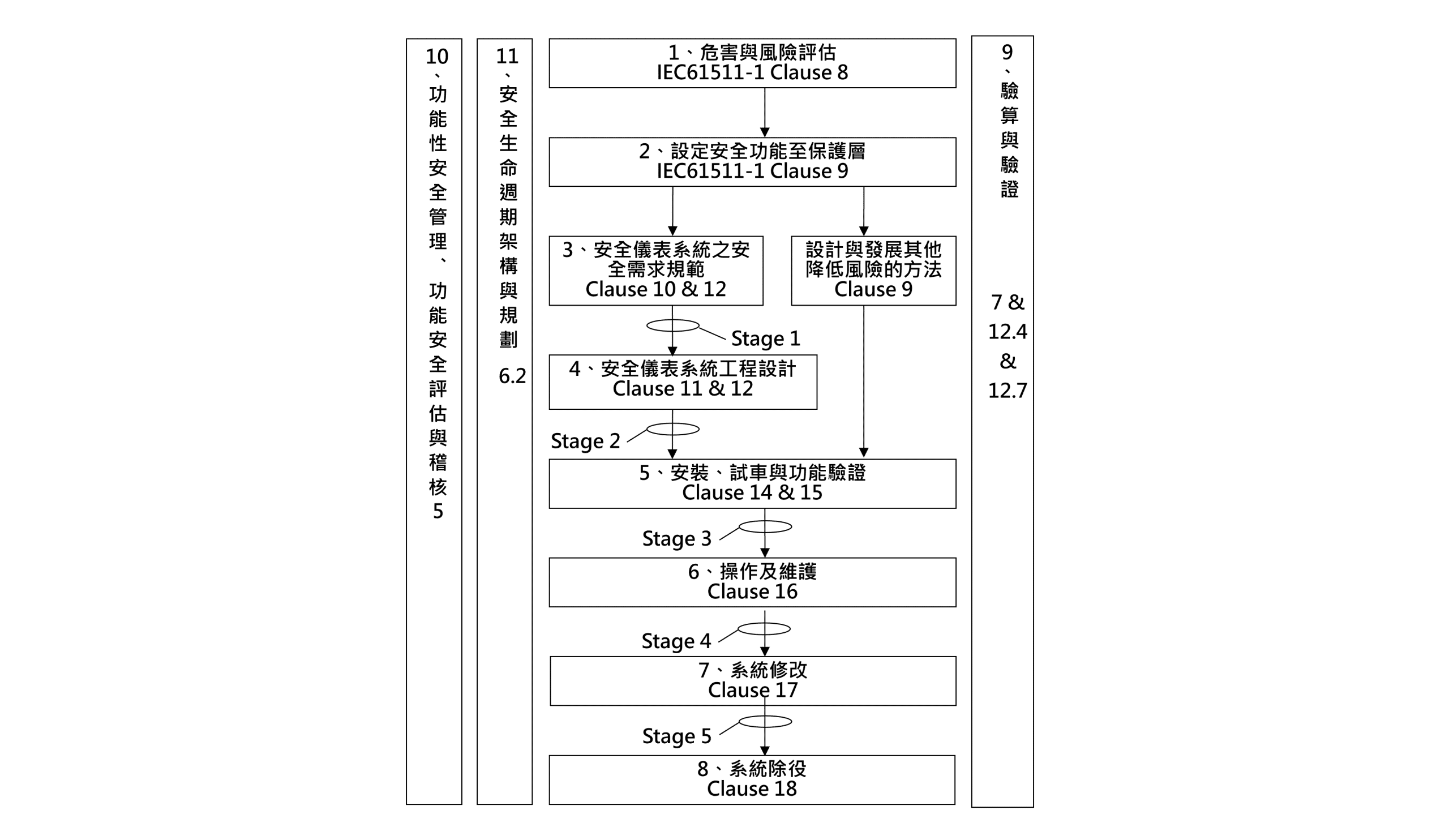
四、設計建置階段
在表一中有一個名詞叫需求失效率PFD (Probability of Failure on Demand) ,而PFDavg即為平均需求失效率,PFDavg為設計階段的主軸,所有的設計、計算只為求出PFDavg;PFDavg與風險降低因子 (RRF, Risk Reduction Factor) 互為倒數關係,此意義表示若RRF=100 (風險須降低100倍) ,則安全儀控迴路(SIF)之PFDavg須設計成1/100,意即此SIF執行100次以上才能允許一次失效。
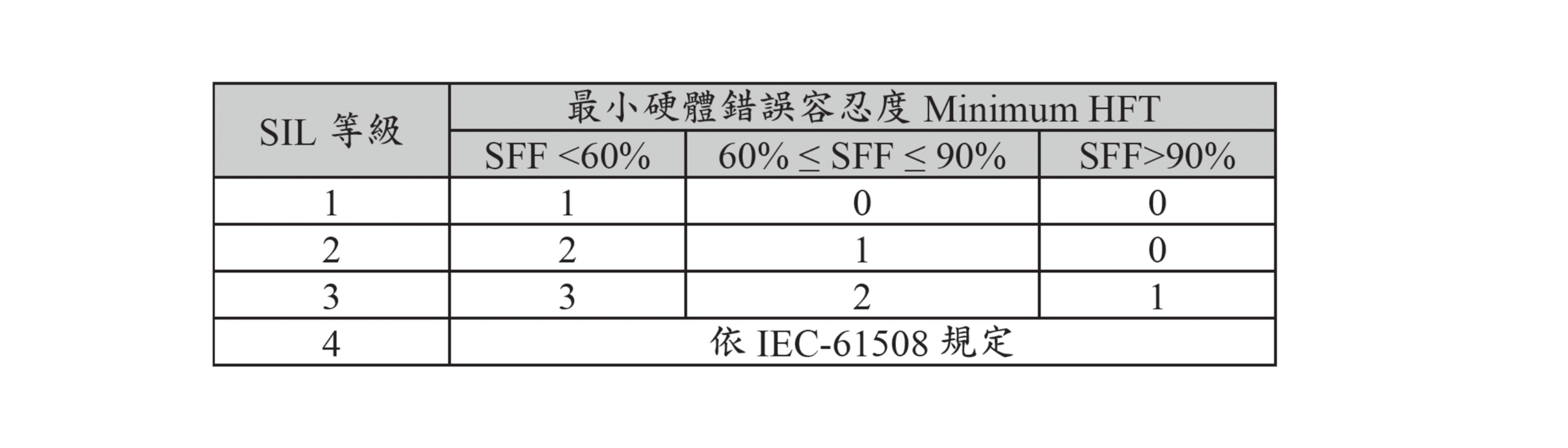
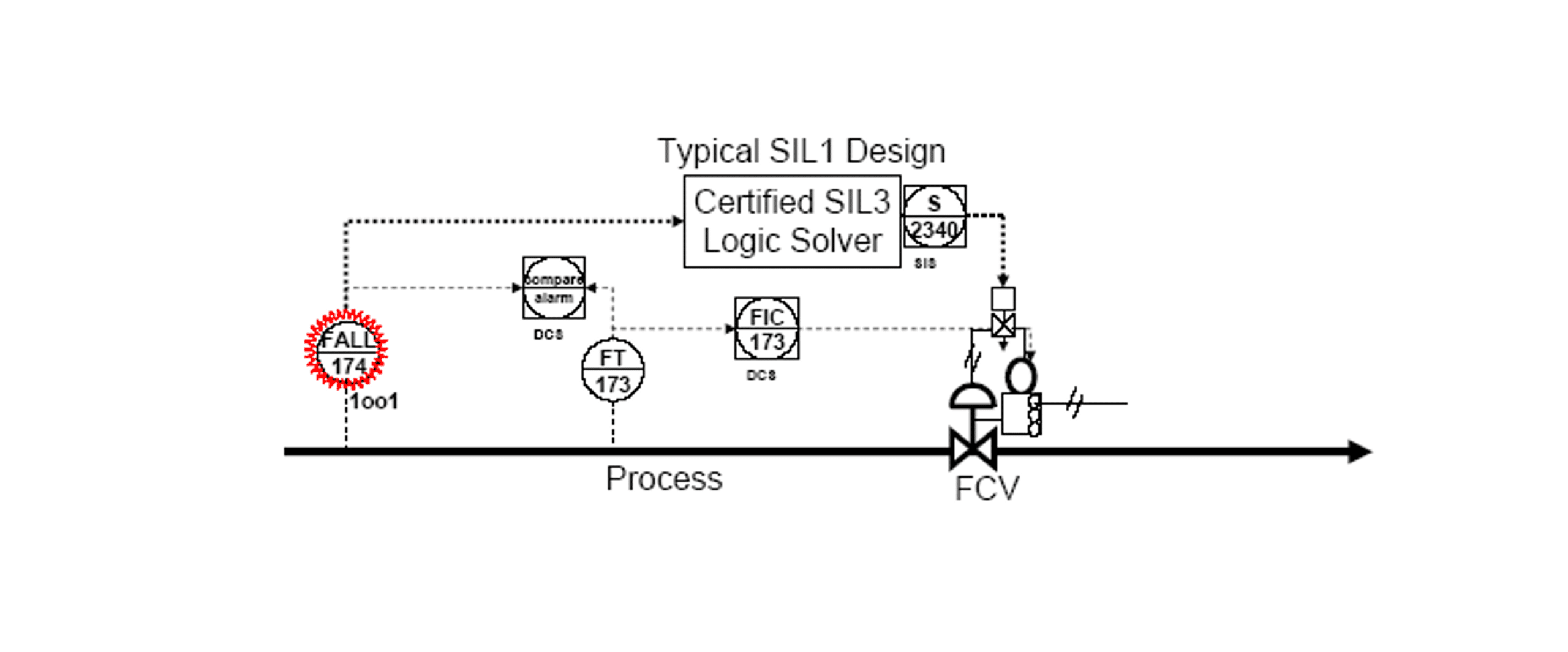
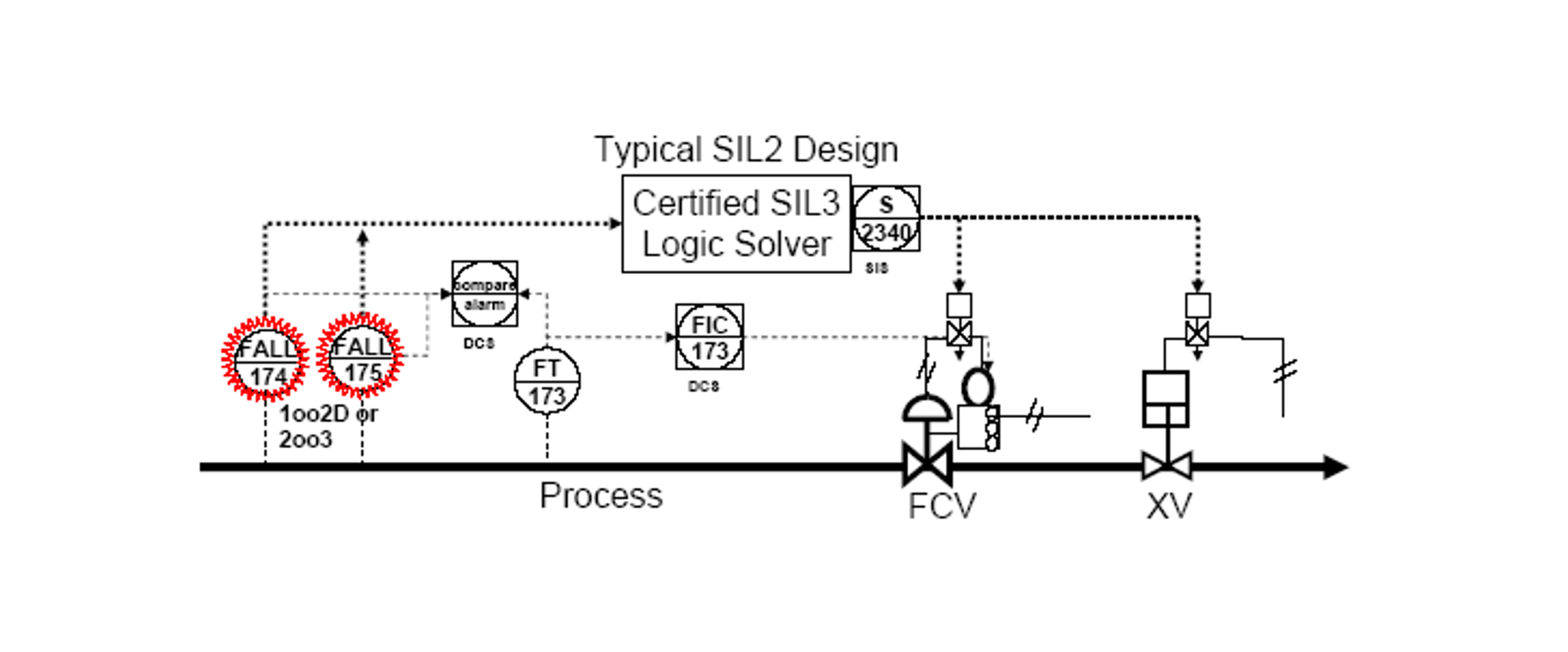
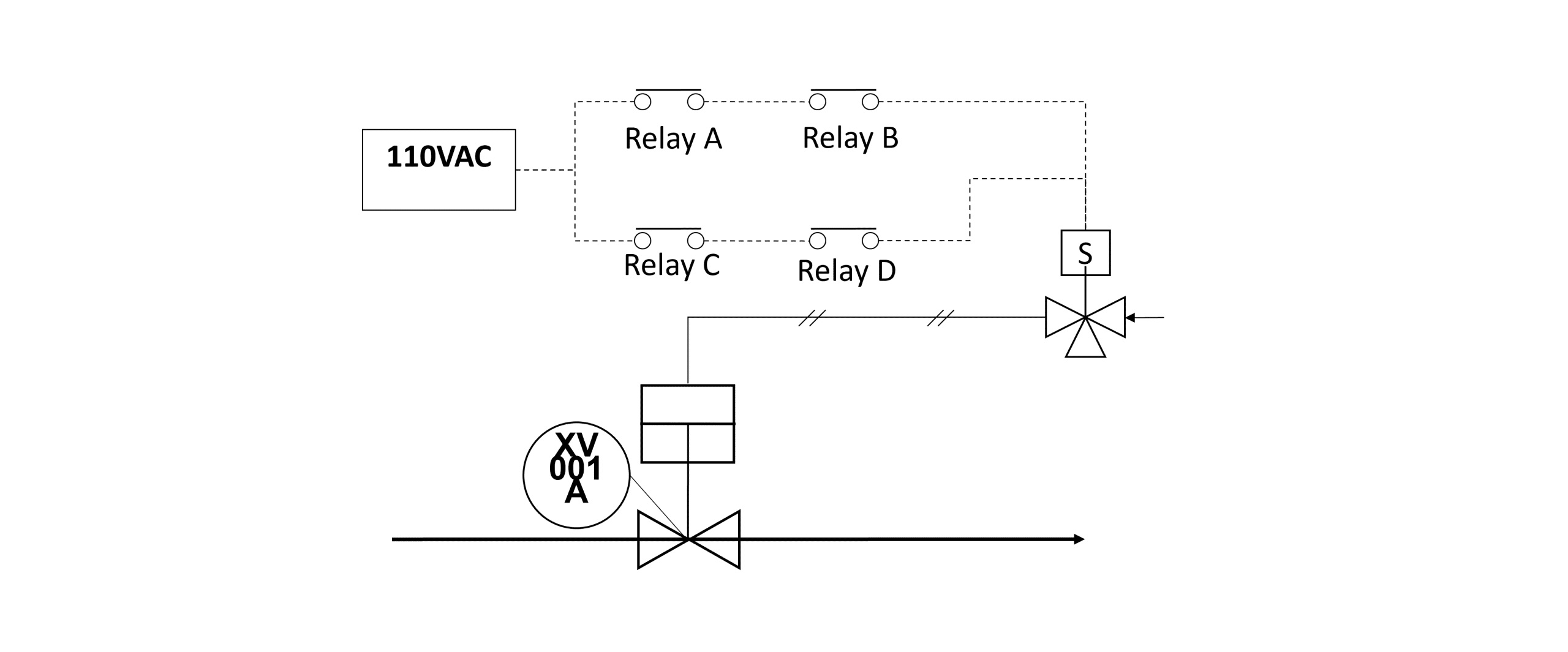
IEC-61511對邏輯運算器而言,其架構限制如表三所示,該圖表中顯示若我們使用未經SIL認證之邏輯運算器 (SFF <60%) ,其必須有3個以上之硬體錯誤容忍度 (HFT) 才能達到SIL 3,意即採用四選一 (1oo4,1 out of 4) 以上之架構方能達成,若必須達成SIL 2的設計,則必須採用2個以上之硬體錯誤容忍度 (HFT) ,意即三選一 (1oo3,1 out of 3) 的架構;若我們採用經過SIL認證之邏輯運算器,若其SFF>90%,則只要1個以上之硬體錯誤容忍度 (HFT) 就能達到SIL 3,意即採用二選一 (1oo2,1 out of 2) 以上的設計即可。
那麼一個迴路的PFD值要如何計算呢?計算PFD值除了需要失效率之外,還必須考慮幾項後續計算迴路PFD的參數,如故障平均時間 (MTTF, Mean Time To Failure) 、故障平均檢修時間 (MTTR, Mean Time To Repair) 、測試間隔時間 (PTI, Proof Test Interval) 等。而迴路中的每個組成元件,也就是每個次系統,其PFD值都必須分開計算,然後再依據SIF計算所有PFD之總和。